

وبلاگ

انکودرها، ابزارهای شگفتانگیزی که در قلب بسیاری از سیستمهای اندازهگیری و کنترل دقیق قرار دارند، گاه میتوانند دنیایی پیچیده و رمزآلود به نظر برسند. اما نگران نباشید! این راهنمای جامع، دروازهای به سوی فهم و کار با انکودرها را برای شما میگشاید.
در این سفر آموزشی، با مفاهیم بنیادی انکودرها آشنا خواهید شد، انواع مختلف آنها را از نظر عملکرد و کاربرد درک کرده و مهارتهای لازم برای راه اندازی و استفاده از آنها در پروژههای خود را به دست خواهید آورد. همراه ما باشید تا آموزش کار با انکودر را در کنار یکدیگر بررسی کنیم.
در این مقاله چه میخوانیم؟
- کارکرد روتاری انکودر چگونه است؟
- مراحل کار با روتاری انکودر
- آموزش کار با ماژول های انکودر
- جمع بندی
کارکرد روتاری انکودر چگونه است؟
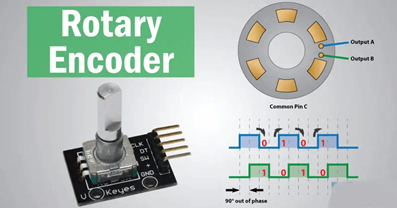
روتاری انکودر یا رمزگذار چرخشی نوعی حسگر است که حرکت زاویهای یا چرخشی را به سیگنالهای الکتریکی دیجیتال یا آنالوگ تبدیل میکند. این سیگنالها نشاندهنده زاویه، سرعت و جهت چرخش جسمی هستند که انکودر به آن متصل شده است.
در سادهترین حالت!
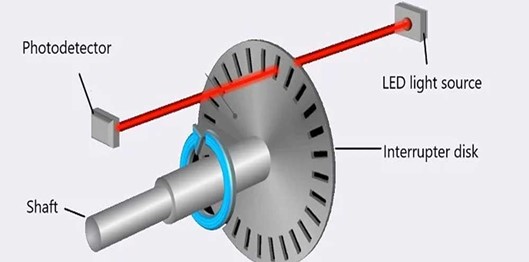
در سادهترین حالت، یک روتاری انکودر از یک دیسک چرخان و یک هد اپتیکال تشکیل شده است. دیسک چرخان دارای شکافها یا طرحهای خاصی است که هنگام چرخش دیسک، نور تابیده شده از هد اپتیکال را قطع میکنند. این قطع و وصل شدن نور به عنوان پالس توسط هد اپتیکال تشخیص داده میشود.
تعداد پالسها
تعداد پالسهای ایجاد شده در هر دور کامل نشاندهنده رزولوشن انکودر است. دقت اندازهگیری زاویه توسط انکودر به رزولوشن آن بستگی دارد.
چرخ دنده
برخی از روتاری انکودرها به جای دیسک چرخان از چرخ دنده استفاده میکنند. چرخ دندهها میتوانند دقت اندازهگیری را افزایش دهند و همچنین گشتاور بیشتری را به انکودر اعمال کنند.
در نهایت، کارکرد اصلی روتاری انکودر تبدیل حرکت زاویهای یا چرخشی به سیگنالهای الکتریکی دیجیتال یا آنالوگ است که اطلاعات مربوط به زاویه، سرعت و جهت چرخش را ارائه میدهند. حال در ادامه به آموزش کار با انکودر و بررسی مراحل آن میپردازیم.
مراحل کار با روتاری انکودر
در آموزش کار با انکود، مراحلی که باید پشت سر بگذارید شامل موارد زیر است:
انتخاب روتاری انکودر مناسب
مرحله اول، مرحله انتخاب یک روتاری انکودر مناسب است. برای این انتخاب به موارد زیر توجه داشته باشید:
- نوع انکودر: ابتدا باید نوع انکودر مورد نیاز خود را بر اساس کاربردتان انتخاب کنید. انکودرهای افزایشی برای شمارش پالسها و انکودرهای مطلق برای تعیین موقعیت مطلق مناسب هستند.
- رزولوشن: رزولوشن انکودر باید متناسب با دقت مورد نیاز شما باشد. رزولوشن بالاتر به معنای پالسهای بیشتر در هر دور کامل و دقت اندازهگیری زاویه بیشتر است.
- نوع خروجی: انکودرها میتوانند خروجی دیجیتال یا آنالوگ داشته باشند. خروجی دیجیتال برای کاربردهایی که به دقت بالایی نیاز ندارند مناسبتر است.
- اندازه و شکل: ابعاد و شکل انکودر باید با فضای نصب شما مطابقت داشته باشد.
اتصال روتاری انکودر
حال نوبت به اتصال روتاری انکودر میرسد. در این اتصال نیز بهتر است به موارد زیر توجه کنید:
- پایهها: اکثر روتاری انکودرها دارای 4 یا 5 پایه هستند که باید به پینهای مناسب روی میکروکنترلر یا دستگاه شما متصل شوند.
- منبع تغذیه: اکثر انکودرها برای کار به منبع تغذیه 5 ولت نیاز دارند.
- محافظ: از سیمهای با کیفیت و اتصالات محکم برای جلوگیری از نویز و تداخل استفاده کنید.
برنامهنویسی میکروکنترلر
بخش مهم آموزش کار با انکودر، برنامهنویسی میکروکنترلر است. در این برنامه نویسی شما باید مراحل زیر را طی کنید:
- کتابخانه: برای خواندن پالسهای انکودر و تبدیل آنها به اطلاعات مربوط به زاویه، سرعت و جهت، باید از یک کتابخانه یا کد مناسب استفاده کنید.
- الگوریتم: الگوریتمی برای پردازش دادههای انکودر و انجام اقدامات مورد نظر خود بنویسید.
تست و عیبیابی
در نهایت، مرحله آخر به تست و عیبیابی میرسد.
- آزمایش: پس از اتمام برنامهنویسی، سیستم خود را به طور کامل آزمایش کنید تا مطمئن شوید که انکودر به درستی کار میکند.
- عیبیابی: در صورت بروز مشکل، اتصالات، کد و الگوریتم خود را بررسی کنید.
با طی کردن این مراحل بهراحتی میتوانید در کنار فراگیری آموزش کار با انکودر، از این دستگاه استفاده کنید.
آموزش کار با ماژول های انکودر
ماژولهای انکودر نوعی حسگر هستند که حرکت زاویهای یا چرخشی را به سیگنالهای الکتریکی دیجیتال یا آنالوگ تبدیل میکنند. این سیگنالها نشاندهنده زاویه، سرعت و جهت چرخش جسمی هستند که انکودر به آن متصل شده است. در این آموزش، نحوه کار با ماژولهای انکودر را به صورت کامل شرح خواهیم داد.
مراحل کار با ماژولهای انکودر
در آموزش کار با انکودر، مراحل کار با ماژولها عبارتاند از:
انتخاب ماژول انکودر مناسب
باید ابتدا یک ماژول مناسب را انتخاب کنید. این انتخاب باید براساس موارد زیر باشد:
- نوع انکودر: ابتدا باید نوع انکودر مورد نیاز خود را بر اساس کاربردتان انتخاب کنید. انکودرهای افزایشی برای شمارش پالسها و انکودرهای مطلق برای تعیین موقعیت مطلق مناسب هستند.
- رزولوشن: رزولوشن انکودر باید متناسب با دقت مورد نیاز شما باشد. رزولوشن بالاتر به معنای پالسهای بیشتر در هر دور کامل و دقت اندازهگیری زاویه بیشتر است.
- نوع خروجی: انکودرها میتوانند خروجی دیجیتال یا آنالوگ داشته باشند. خروجی دیجیتال برای کاربردهایی که به دقت بالایی نیاز ندارند مناسبتر است.
- منبع تغذیه: ولتاژ مورد نیاز برای راه اندازی ماژول را بررسی کنید.
- پکیج: ماژولهای انکودر در پکیجهای مختلف مانند DIP، SMD و breadboard ارائه میشوند. نوع پکیج را با توجه به نیاز خود انتخاب کنید.
اتصال ماژول انکودر
حال نوبت به نحوه اتصال ماژولها به انکودر میشود. برای اتصال مراحل زیر را طی کنید:
- پایهها: اکثر ماژولهای انکودر دارای 4 یا 5 پایه هستند که باید به پینهای مناسب روی میکروکنترلر یا دستگاه شما متصل شوند. پایههای رایج شامل:
| پین | توضیحات |
| VCC | ولتاژ تغذیه: این پین باید به منبع تغذیه مناسب، با توجه به ولتاژ ذکر شده در مشخصات انکودر، متصل شود. |
| GND | زمین: این پین باید به زمین منبع تغذیه متصل شود. |
| A | سیگنال پالس کانال A: این پین سیگنال پالس مربعی را تولید می کند که با چرخش دیسک انکودر در جهت عقربههای ساعت فرکانس آن افزایش مییابد. |
| B | سیگنال پالس کانال B: این پین سیگنال پالس مربعی را تولید میکند که با چرخش دیسک انکودر در جهت خلاف عقربه های ساعت فرکانس آن افزایش مییابد. |
| Z | سیگنال مرجع (فقط برای برخی از انکودرها): این پین در هر دور کامل دیسک انکودر یک پالس تولید میکند. این پین برای تعیین موقعیت مطلق محور انکودر استفاده میشود. |
- منبع تغذیه: ماژول را به منبع تغذیه مناسب، با توجه به ولتاژ ذکر شده در مشخصات، متصل کنید.
- محافظ: از سیمهای با کیفیت و اتصالات محکم برای جلوگیری از نویز و تداخل استفاده کنید.
برنامهنویسی میکروکنترلر
مانند بخش قبل آموزش کار با انکودر، در این قسمت نیز نیاز به برنامهنویسی میکروکنترلرها دارید که مراحل آن به شرح زیر است:
- کتابخانه: برای خواندن پالسهای انکودر و تبدیل آنها به اطلاعات مربوط به زاویه، سرعت و جهت، باید از یک کتابخانه یا کد مناسب استفاده کنید. کتابخانههای محبوب برای میکروکنترلرهای AVR و Arduino عبارتند از:
- Encoder library for Arduino: https://github.com/PaulStoffregen/Encoder
- uCosII Rotary Encoder Driver: https://github.com/topics/rotary-encoder
- الگوریتم: الگوریتمی برای پردازش دادههای انکودر و انجام اقدامات مورد نظر خود بنویسید. به عنوان مثال، میتوانید از انکودر برای کنترل موتور، اندازهگیری زاویه یا تنظیم مقادیر استفاده کنید.
تست و عیبیابی
در نهایت باید تمامی مراحلی که انجام دادهاید را تست و عیبیابی کنید تا مطمئن شوید که همه اجزا به درستی کار میکنند.
نکات مهم:
- قبل از شروع کار، دیتاشیت انکودر خود را به دقت مطالعه کنید.
- از منبع تغذیه مناسب و سیمهای با کیفیت استفاده کنید.
- اتصالات را به درستی انجام دهید و از محکم بودن آنها اطمینان حاصل کنید.
- کد و الگوریتم خود را به دقت تست و عیبیابی کنید.
- از کتابخانهها و کدهای معتبر استفاده کنید.
جمعبندی
آموزش کار با انکودر چرخشی شامل مراحل نصب، اتصال به میکروکنترلر و خواندن دادهها است. ابتدا، انکودر به محور مکانیکی متصل میشود. سپس، پایههای سیگنال A و B به پینهای ورودی میکروکنترلر متصل میشوند. با استفاده از برنامهنویسی، سیگنالهای خروجی انکودر خوانده شده و جهت و میزان چرخش تعیین میشود.
انکودرهای چرخشی با تولید پالسهای دیجیتال، موقعیت زاویهای یا سرعت چرخش را اندازهگیری میکنند و در کاربردهای مختلفی مانند رباتیک و کنترل صنعتی استفاده میشوند. توجه به دقت، رزولوشن و نحوه نصب از نکات مهم در استفاده از این انکودرها است که در این مقاله از پیمان الکتریک به آن پرداختیم.
سوالات متداول
رزولوشن انکودر چه نقشی در دقت اندازهگیری زاویه دارد؟
هر چه رزولوشن انکودر بالاتر باشد، تعداد پالسهای بیشتر در هر دور تولید میشود. به عنوان مثال، یک انکودر با رزولوشن 360 پالس در دور، در هر درجه چرخش 1 پالس تولید میکند. در حالی که یک انکودر با رزولوشن 1024 پالس در دور، در هر 0.36 درجه چرخش 1 پالس تولید میکند.
تفاوت بین انکودرهای افزایشی و مطلق چیست؟
انکودرهای افزایشی فقط تعداد پالسهای تولید شده در هر جهت را میشمارند. در مقابل، انکودرهای مطلق موقعیت مطلق محور را در هر لحظه خاص با استفاده از یک کد منحصر به فرد برای هر موقعیت ارائه میکنند. این کد میتواند به صورت باینری، گری یا BCD باشد.
چه نوع اتصالاتی برای انکودرها رایج است؟
اتصالات رایج برای انکودرها عبارتند از اتصالات DIP، اتصالات SMD و اتصالات کابل.